Всем привет! Сейчас поговорим о том, как можно сделать GPS-трекер для авто своими руками из телефона. Использовать его, конечно же, будем на примере личной машины. Хотя данную схему можно смело применять для наблюдения за любыми передвигающимися объектами (людьми, животными и так далее).
Поэтому пусть теперь мужская половина населения вздрогнет, поскольку в наши дни их жены могут без особого труда
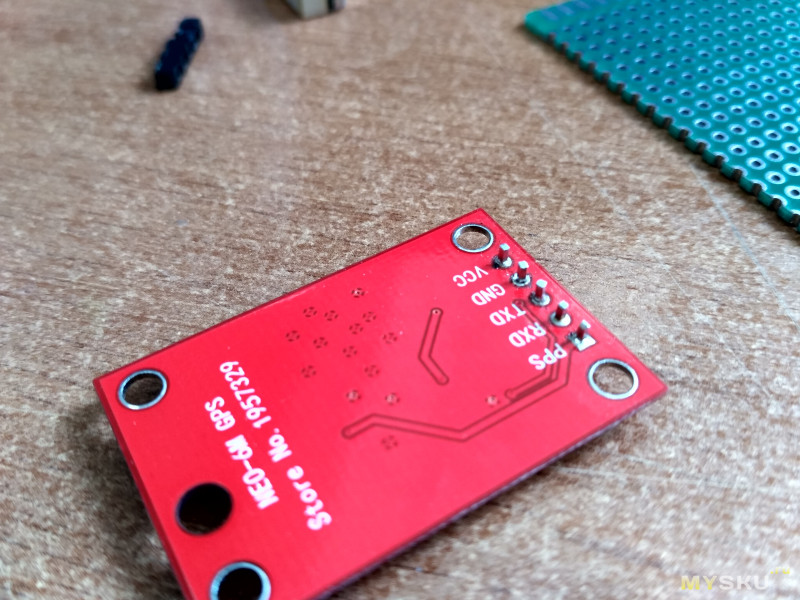
Внешний вид
Размеры данного модуля не большие 35 х 24 мм, и он сможет найти свое место не только в носимой электронике, но и в RC — аппаратах.
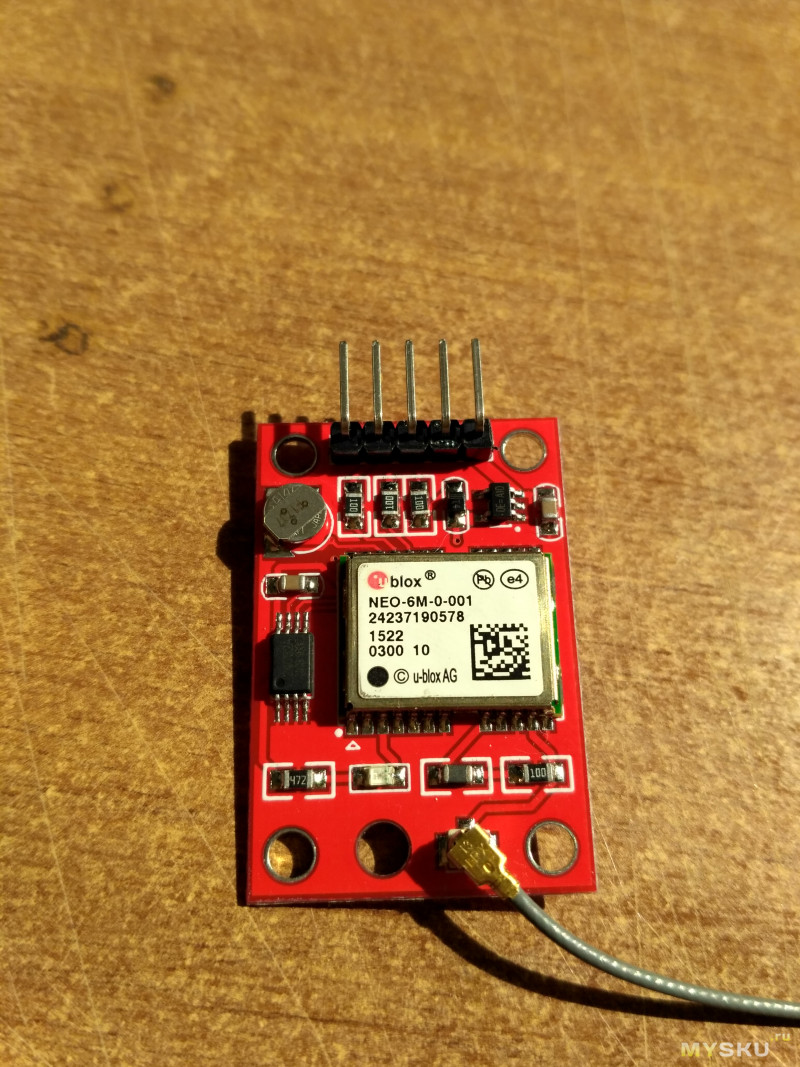
В комплекте идет пассивная антенна:
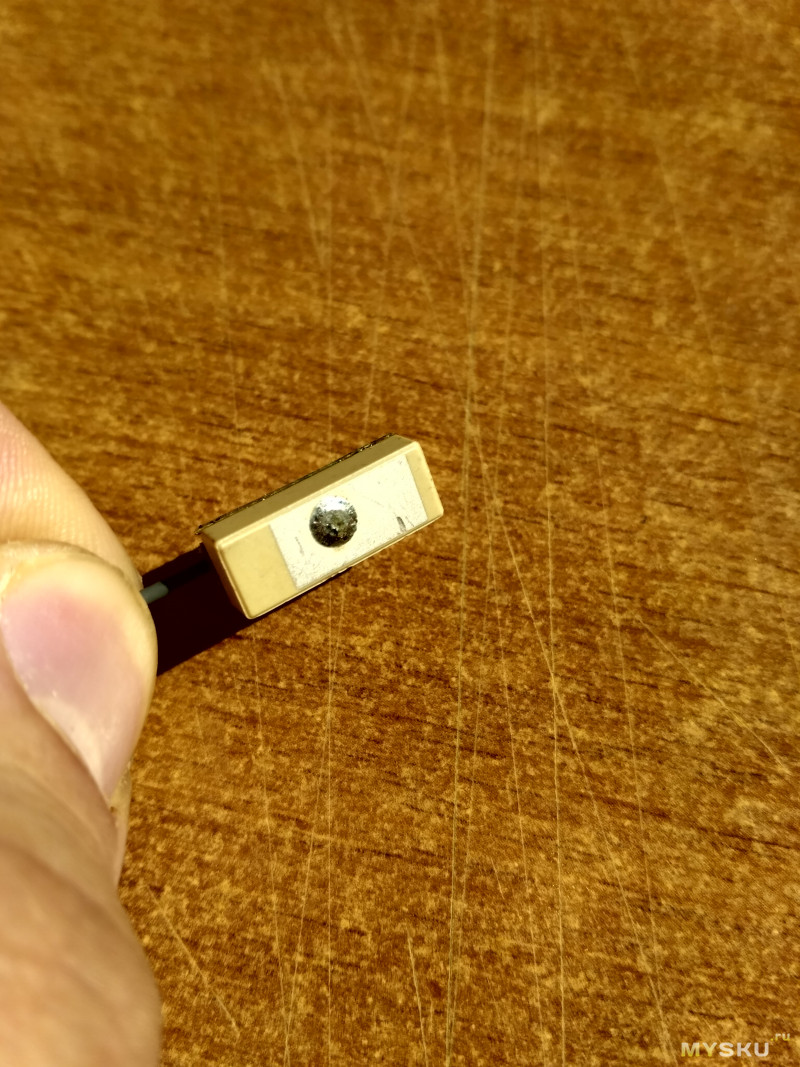
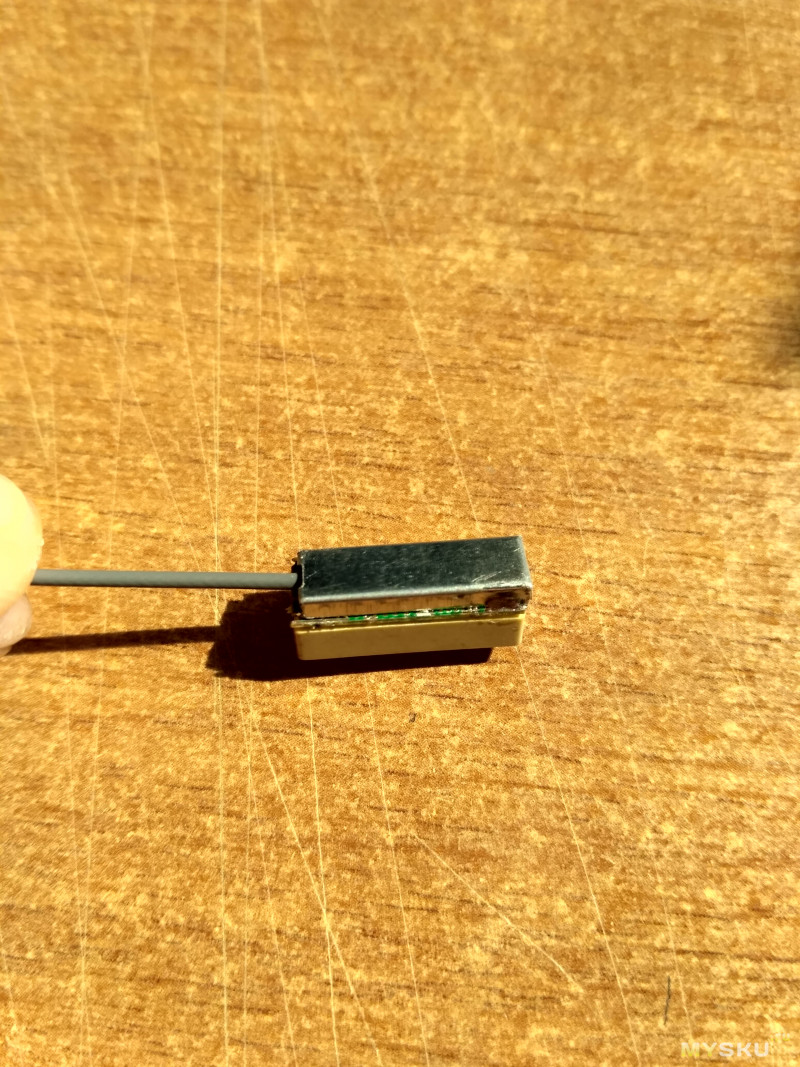
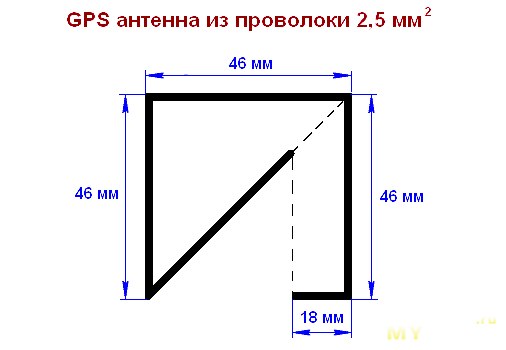
При желании всегда можно заменить активной или изготовить самому, по этой методике:
По запросу, в комментариях, выдам ссылку на мануал.
На сегодняшний день модуль не является устаревшей моделью, и активно используется, + имеется поддержка производителя
даташит с сайта производителя
.
А тут находится
страница, ведущая на сайт
производителя данного аппарата
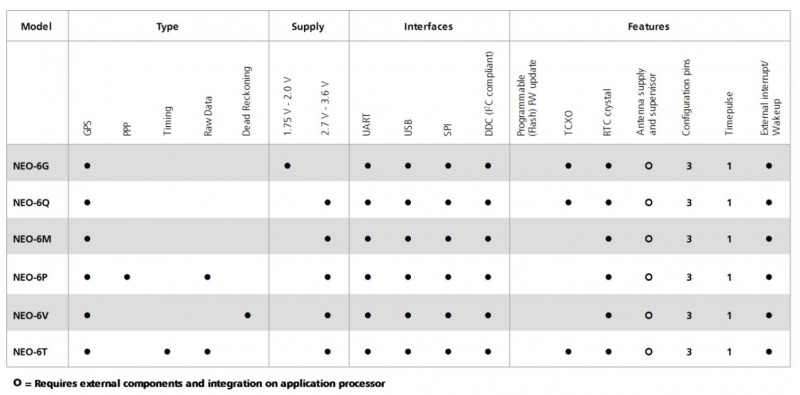
На приведенном изображении кратко описаны возможности данного семейства приемников:
Источник: http://mysku.ru/blog/aliexpress/62773.html
Принципы работы
При выборе устройства слежения необходимо определиться с тем для каких целей трекер будет использоваться. Если это автомобильный gps трекер, то по своим размерам, параметрам, техническим характеристикам он лучше всего подходит для скрытой установки именно в автомобиле.

Такой gps трекер для машины можно совершенно незаметно установить в транспорте, так, что его никто не обнаружит. Для слежения за людьми или животными больше подойдет персональное устройство.
Трекер для автомобиля работает как:
- приемник спутникового сигнала;
- передатчик сигнала спутника в формате GSM на принимающее устройство (сотовый телефон, компьютер, ноутбук или планшет);
- трекер автономное устройство, снабженное источником питания – батареей или аккумулятором.
Тем, кому необходимо контролировать сразу несколько автомобилей имеет смысл подключиться к gps трекеру для мониторинга. Это система позволяет постоянно контролировать машину и имеет ряд положительных характеристик.
 Принцип действия GPS трекера
Принцип действия GPS трекера Преимущества мониторинга:
- постоянно определяются координаты машины;
- отслеживается график перемещения транспорта;
- анализируется скорость и расход топлива;
- данные сохраняются в течение двенадцати месяцев;
- бесплатная возможность контролировать одновременно пять приборов,
Все текущие данные выводятся на монитор смартфона или планшета в режиме онлайн.
Трекер специальное устройство слежения за автомобилем, в персональном варианте и за человеком. Работа его зависит напрямую от спутниковой связи, так как без нее устройство не может определить местоположение автомобиля. Для контроля за большим количеством объектов целесообразно подключиться к системе мониторинга.
Источник: http://reckey.ru/besprovodnoe/gps-treker-dlya-mashiny-svoimi-rukami/
Какой сервер GPS-мониторинга выбрать?
Да, друзья, начинается все именно с сервера, а уже затем под его параметры настраивается специальное ПО на телефоне. В дальнейшем я буду показывать работу системы слежения на примере онлайн-сервиса gpshome.ru. Поэтому необходимо пройти по указанной ссылке и зарегистрироваться.
Затем можно переходить к вопросу настройки GPS-трекера. Поскольку в нашем случае для этих целей будет использоваться самый обыкновенный смартфон на базе Android, то на него нужно установить небольшую программку по имени GPS Home Tracker.
Именно она свяжет пользовательское устройство с сервером спутникового мониторинга. Бесплатно скачать ее следует в официальном магазине вот по этой ссылке. С подробными техническими требованиями к аппарату можно ознакомиться в разделе «Приложение Андроид» на сайте сервиса:
Интересный момент заключается в том, что даже старый телефон без GPS-модуля вполне сгодится. В таком случае система будет определять положение объекта по сотовым вышкам. Конечно, это приведет к увеличению погрешности. На что еще хотеть при таком раскладе?
Источник: http://zen.yandex.ru/media/pronetblog/kak-sdelat-gpstreker-dlia-avto-svoimi-rukami-iz-starogo-telefona-mujiki-beregites-jen-5b067a39256d5ce5fa3e61b6
Принцип работы и область применения
Маячок находится в спящем режиме и включается по запрограммированному циклу. При активации происходит обмен параметрами со спутником или станциями сотовой связи стандарта GSM, а затем устройство уходит в спящий режим. Из-за особенностей работы информация от маячка имеет вид отдельных точек, которые можно соединить ломаной прямой.
В стандартном графике маяк выходит на связь до четырех раз в сутки. В случае необходимости режим работы прибора можно изменить через систему сотовой связи и увеличить частоту включения до одного раза в 5-10 минут. Постоянный обмен информацией позволит ускорить поиск машины или человека, но может быстро разрядить аккумуляторную батарею маячкового устройства. В режиме подачи сигнала раз в сутки маячок способен функционировать на одном аккумуляторе три-четыре года. Переключение устройства в режим тревоги сокращает время работы до 12-15 суток.
Маячок является отличным средством для пассивной защиты машины от угона. Малые размеры позволяют устанавливать устройство под обшивками автомобиля, а периодический режим работы обеспечивает устойчивость против сканеров или глушилок сигнала. Маяки применяются для слежения за маршрутом поставки груза путем размещения устройства в контейнере или в упаковке. При пропаже груза остается возможность отследить местоположение тары и попытаться выйти на след похитителей. Часто такие девайсы используются для контроля за местонахождением детей или пожилых людей.
Разновидности
Существуют различные GPS-маячки:
- С возможностью подключения к замку зажигания автомобиля. Это позволяет устройству автоматически переключаться в режим частого обмена координатами со станциями при попытке несанкционированного запуска двигателя.
- Встречаются конструкции маячков со встроенными микрофонами, которые позволяют дистанционно прослушивать салон автомобиля.
- Имеются модели маяков с отдельно выведенной кнопкой для активации режима тревоги. Устройства носятся в кармане или устанавливаются на транспортном средстве. Нажатие на кнопку производится при попытке ограбления или угона. Прибор стал популярен для подачи ребенком сигнала о помощи. При нажатии клавиши на сотовый телефон родителей поступают координаты места подачи тревоги.
- В виде часов. Одним из образцов устройств для контроля за перемещением человека являются часы Smart Watch A19, которые могут отслеживать местонахождение в реальном времени и сохранять историю перемещений. Имеется возможность ограничения территории перемещения владельца. При выходе за пределы на телефон родителей поступает текстовое сообщение или звонок.
- Выпускаются маячки в виде брелков, которые позволяют родителям осуществлять двухстороннюю связь с ребенком. Маяк с небольшими габаритами и весом легко размещается в кармане. При этом устройство имеет герметичный корпус, который продлевает срок службы изделия.
Применение заводских устройств не требует специальной установки и подключения. Достаточно разместить маяк в автомобиле или другом охраняемом объекте и установить связь с мобильным телефоном или смартфоном.
Кроме отдельных устройств, имеется возможность отслеживания ребенка или груза по сигналам смартфона. У операторов сотовой связи есть специальные тарифные планы, в рамках которых можно видеть местоположение второго абонента, например, тариф МТС “Ребенок под присмотром”.
Источник: http://avtobez.com/gps-i-gsm/mayachok-svoimi-rukami-8957/
Шаг 1. Что нам пригодится
Набор деталей для этого урока не велик:
- Arduino MKR Fox 1200 × 1
- Модуль GPS (на выбор, но мы использовали реплику ublox NEO6m (ATGM332D) × 1
- Транзистор общего назначения NPN (мы использовали BC548) × 1
- Резистор 1 кОм × 1
Источник: http://arduinoplus.ru/arduino-gps-treker-na-mkrfox1200/
Шаг 2. Информация о проекте
Трекер использует GPS-модуль ATGM332, чтобы получить GPS-положение с большей точностью, чем услуги определения местоположения, предоставляемые Sigfox. Затем данные позиции отправляются как «строка» через сеть Sigfox и, наконец, доставляются по электронной почте.
![]()
Arduino MKR FOX 1200
Плата похожа на Arduino Zero, которая основана на SAM D21 и включает модуль ATA8520 Sigfox. Это плата с низким энергопотреблением, которая поставляется вместе с платой с бесплатной подпиской на один год в сеть Sigfox (до 140 сообщений в день), а также бесплатным доступом к службе геолокации Spot’it.
Дополнительная информация здесь.
GPS-модуль ATGM332
Этот недорогой маломощный GPS-модуль очень хорошо подходит для Arduino MKR FOX 1200, поскольку он работает только с 2,7 В (номинальный 3,3 В).
Первоначально должен был быть куплен модуль NEO6m2, который имеет режим ожидания, но пришлось использовать NEO6. Фактически это был модуль ATGM332. В результате у него не было режима ожидания, поэтому нужно было использовать транзистор для включения модуля GPS, когда это необходимо, и выключить его, чтобы сэкономить аккумулятор. Наша цель — иметь информацию о местоположении довольно редко, то есть 4 сообщения в час, поскольку Sigfox позволяет только 140 сообщений в день.
Мы используем библиотеку TinyGPS (https://github.com/mikalhart/TinyGPS) для декодирования кадров GPS.
Транзисторный переключатель
Нужно было включить и выключить GPS, когда это необходимо. Модули реле слишком громоздки и мощны, если нужно только переключить нагрузку 3 В и несколько миллиампер. Кроме того, для большинства модулей реле требуется 5 В. Таким образом, транзистор будет лучшим решением. Кроме того, MKR FOX 1200 обеспечивает только 7 мА на пине ввода/вывода.
Подойдет транзистор BC548 NPN. Когда нулевой сигнал подается на базу транзистора, он выключается, действуя как открытый выключатель, и ток коллектора не течет. При положительном сигнале, подаваемом на базу транзистора, он становится «включенным», действующим как замкнутый переключатель, и максимальный ток цепи протекает через устройство.
Источник: http://arduinoplus.ru/arduino-gps-treker-na-mkrfox1200/
GPS трекеры на базе телефонов
 Мобильники могут применяться в качестве GPS-маяков. GPS трекерами выступают смартфоны с опцией GPS-поиска, а также обычные телефоны, но для этого потребуется доработка мобильника без нарушения внутреннего конструктивного устройства.
Мобильники могут применяться в качестве GPS-маяков. GPS трекерами выступают смартфоны с опцией GPS-поиска, а также обычные телефоны, но для этого потребуется доработка мобильника без нарушения внутреннего конструктивного устройства.
Отследить объект со смартфоном не сложно. До уровня тренера он доводится простыми манипуляциями подключения к сети объекта. Потребуется установка соответствующих GPS-приложений, с последующей настройкой. Экспертами рекомендовано активировать опции:
- Автозапуска;
- Информирования (желание владельца);
- Внешнего питания;
- Абсолютного пробуждения (желание владельца);
- Обработки указаний.
Полноценным маяком мобильное устройство станет, когда задастся минимальный промежуток времени при обновлениях сведений, отправке SMS-ок при пропаже общения с серверами. Если владельцу требуется, то для устойчивого функционирования GPS-трекеров предлагается выполнить часть потребных настроек в разделе «События».
 Маяк становится полноценным после регистрации на соответствующих сайтах, прохождения идентификации. Появившаяся метка на карте смартфона, с местом положения, подтверждает правильность выполненных шагов, превратив своими руками МУ в маяк.
Маяк становится полноценным после регистрации на соответствующих сайтах, прохождения идентификации. Появившаяся метка на карте смартфона, с местом положения, подтверждает правильность выполненных шагов, превратив своими руками МУ в маяк.
Обычное мобильное устройство, у которого нет модуля навигации, превращается в GPS трекер после приложения небольших усилий, вспомогательного инструмента, оборудования. Подсобными материалами и инструментом выступают:
- Обычные сотовые телефоны;
- GPS, GPRS блоки;
- Приемники сигналов;
- Соединительные переходники;
- Режущий инструмент, паяльники.
 Доработка мобильного телефона до состояния GPS-маяка заключается в соединении блока навигации с самим устройством. Соединяется проводом от зарядного приспособления, один конец, которого совместим с зарядным разъемом МУ, другой паяется к блоку навигации. Включением приемника, настройкой мобилки, прибор доводится до состояния GPS трекера.
Доработка мобильного телефона до состояния GPS-маяка заключается в соединении блока навигации с самим устройством. Соединяется проводом от зарядного приспособления, один конец, которого совместим с зарядным разъемом МУ, другой паяется к блоку навигации. Включением приемника, настройкой мобилки, прибор доводится до состояния GPS трекера.
С таким маяком стало доступно отслеживать нахождение МУ, находящихся в пользовании у граждан. Сведения о выявленных координатах поступают на GPS трекер, изготовленный своими руками. Предоставление информации выполняется SMS-ками.
Сотовые операторы тоже не сидят на месте. Ими освоено предоставление соответствующих услуг. Активация доступна любому МУ без GPS-навигации, маяк в таком случае не нужен. Списки абонентов передаются оператору. Для получения информации потребуются сделать запрос по форме, с указанием нужного абонента.
Источник: http://ugonavto.net/sovet/kak-sdelat-gps-mayak-svoimi-rukami-sovety-ekspertov.html
Характеристики трекера А8
- Название модели: mini A8 GPS Tracker
- Мощность аккумулятора: 500mAh
- Напряжение: 5V Li-Ion
- Рабочая частота: GSM850/900/1800/1900MHz
- Режим ожидания: 12 дней
- Производитель: Гонконг
- Размер: 43х33х13 мм

Источник: http://radioskot.ru/publ/mobilniki/gps_treker/19-1-0-1032
Подключение модуля к Arduino
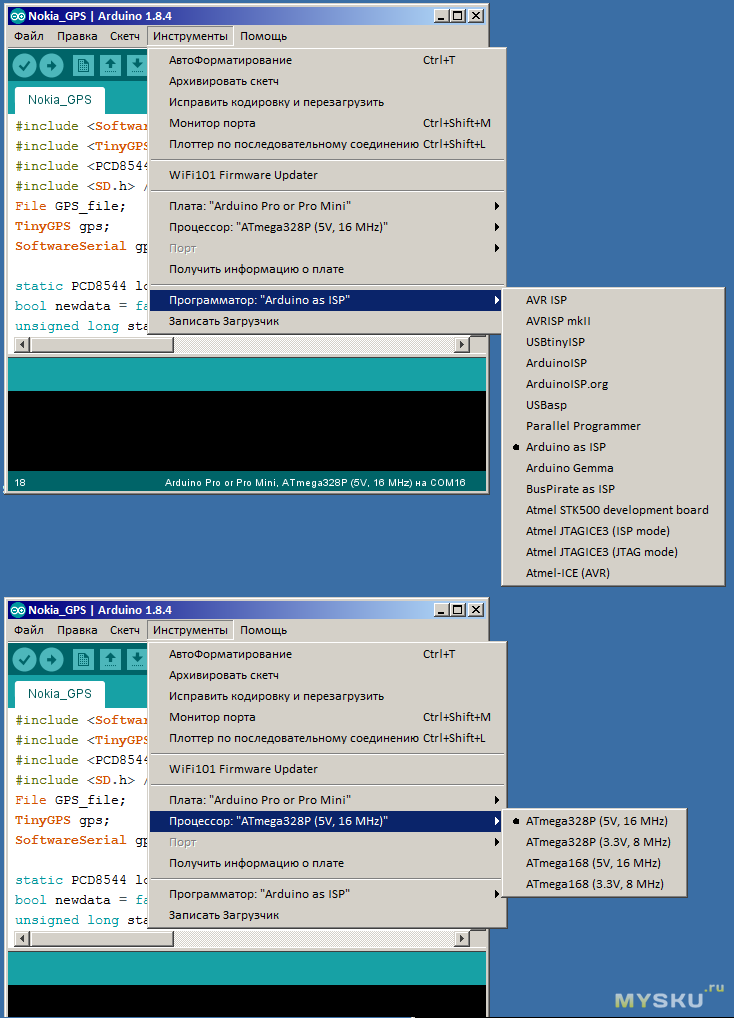
Подготовим программатор для прошивки:
Затем в Нано зашиваем этот скетч:
Дополнительная информация
После этого выбираем Ваш контроллер Pro Mini, указываем программатор ArduinoISP и шьем контроллер, используя команду
Скетч -> Загрузить через программатор
и нажимаем кнопку Reset на Pro mini, пойдет прошивка контроллера (у меня проходит только со второй попытки, нужно набраться терпения):
Как выше говорил, я очень люблю ко всяким гаджетам подвязывать дисплеи, ну просто жуть как, поэтому данный
«проект»
мое желание не обошло стороной.
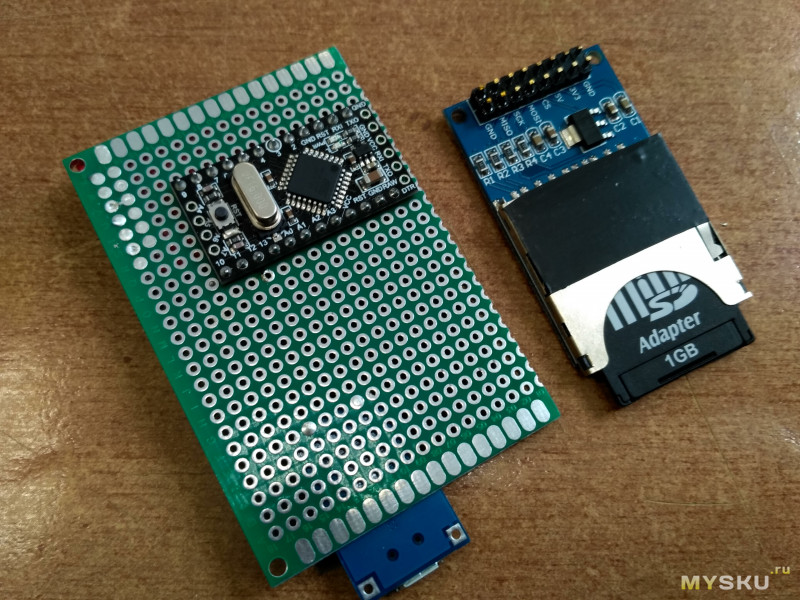
Что нам для всего этого потребуется:
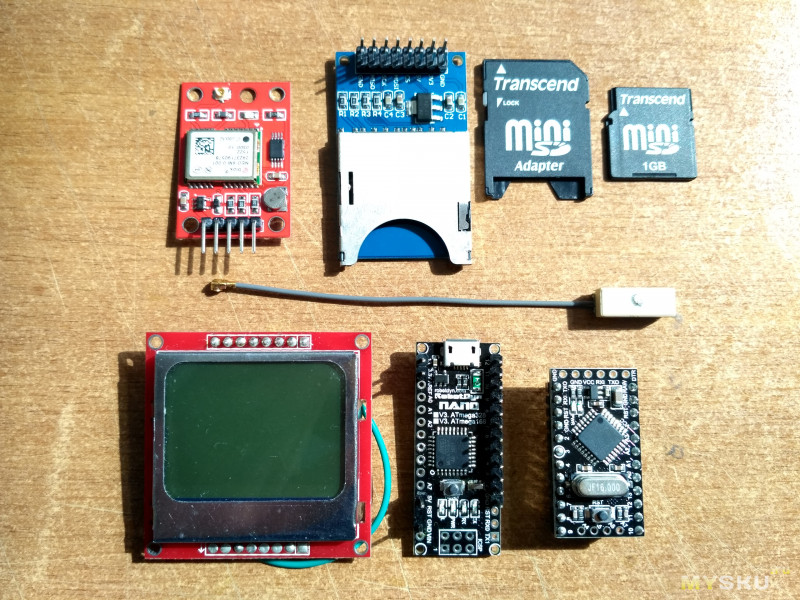
В общем, собрал весь хлам, который валялся без дела:
1. SD card module, очень огромный, поэтому я старался как можно скорее избавится от него.
2. Дисплей на базе контроллера PCD8544, всем известный нокиа дисплей.
3. Карта памяти на 1Гб, с не популярным стандартом MiniSD, вообще был без идеи куда ее воткнуть, а хочется все пустить в дело, вот и пускай поработает на благо навигации.
4. Потребуется мозг, большой такой мозг Pro Mini на чипе 328P.
Как писал выше, будем шить через Arduino Nano с прошитым в нее загрузчиком.
Вообще я очень старался засунуть весь проект в нано, ну просто очень. Не получается, либо отказываемся от карты памяти, либо от дисплея.
5. Конечно же, сам модуль + антенна, как писал выше можно изготовить самому.
6. Ах да, чуть не забыл, потребуется еще корпус иначе, что за устройство без корпуса.

В качестве корпуса были закуплены, еще раз
те самые коробки
, но в серебряном виде, на пробу. Скажу так, мне абсолютно не понравился серебряный цвет, черный смотрится лучше.
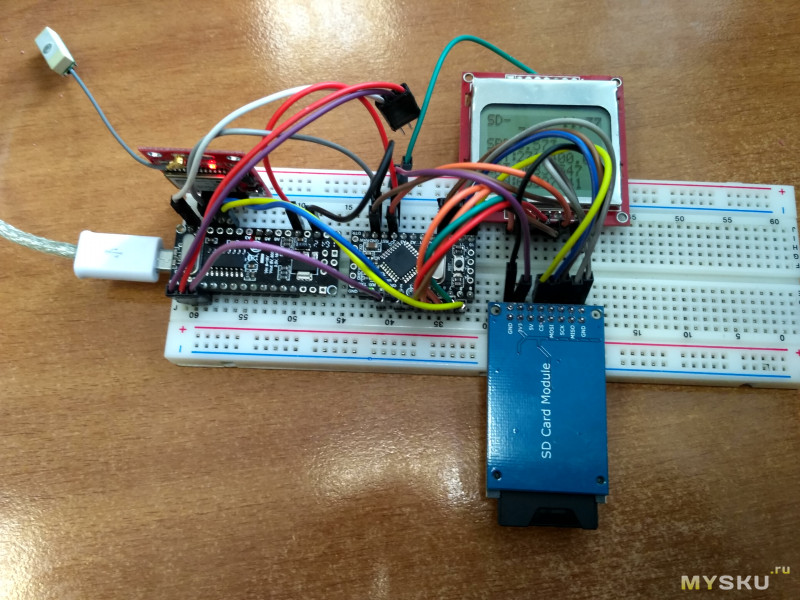
Когда все комплектующие есть в наличии, можно все это подключить и запрограммировать.
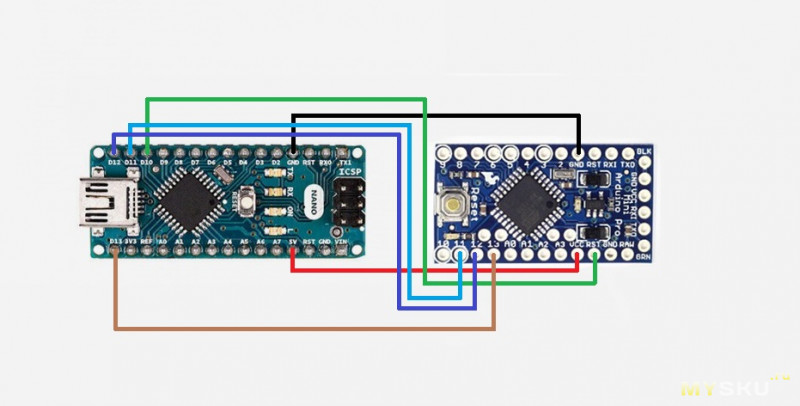
Подключаем к Pro Mini по следующей схеме:
Дисплей:
RST — D6
CE — D7
DC — D5
DIN — D4
CLK — D3
VCC — 5V (опционально в моем случае, в остальных 3.3В )
Light — GND
GND — GND
Подсветка мне была не нужна, и я не стал ее подключать.
SD карта:
CS-D10
MOSI-D11
MISO-D12
SCK-D13
GND — GND
5V — VCC (опционально в моем случае, в некоторых при наличии преобразователя подключаем на 3.3В)
GPS модуль:
RX-D8
TX-D2
GND — GND
VCC-3.3 (3.3 это предел!)
Не забываем подключать антенну на модуль, питание я брал с Нано тк. была подключена для отладки, далее все будет переделано на аккумулятор.
Примерный вид:
Код прост и незамысловат, для использования Вам понадобится, пожалуй
самая легкая библиотека для дисплея
. Далее
библиотека для GPS
. Остальные являются встроенными. По коду, строка — time*0.000001+5, по сути я привел время в удобоваримый вид и добавил часовой пояс. Можно этого не делать и получать чистые результаты.
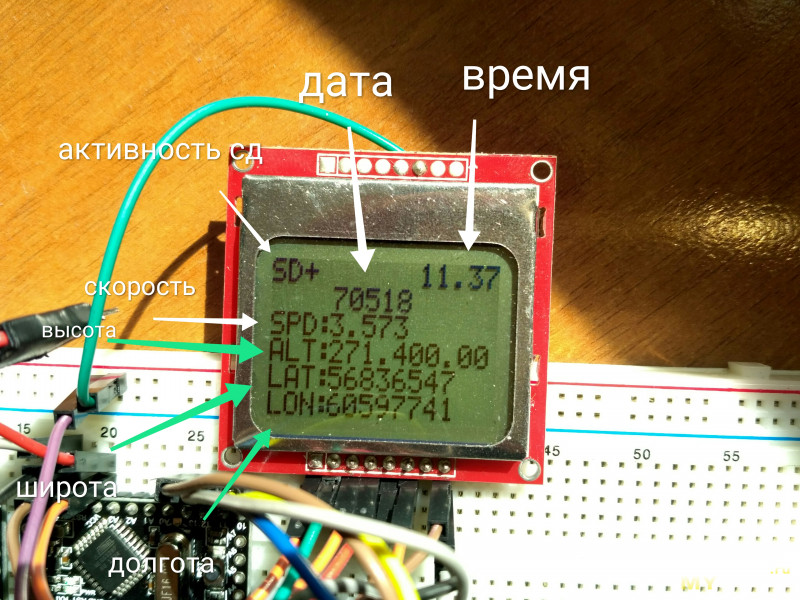
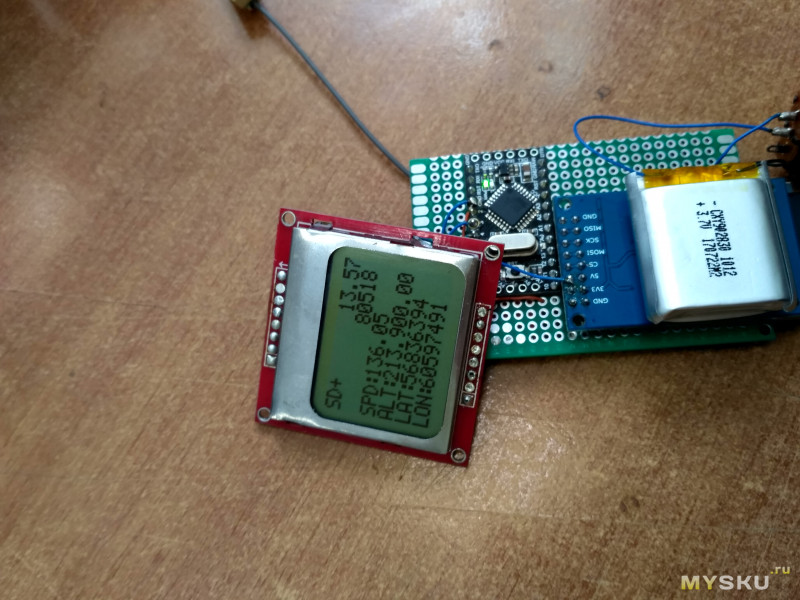
Ещё один нюанс по библиотеке дисплея заключается в следующем у дисплея, включая с нулевой строкой, всего влезет 6 строк. Что довольно мало, поэтому нужно сразу решать, какую информацию выводить, что-то придется выводить символами, экономя место. Дисплей перерисовывается каждую секунду, при этом обновляя и записывая информацию, поступающую со спутников.
При ошибке чтения файла или отсутствия доступа до карты SD будет выводиться сообщение
SD-
, в остальных случаях
SD+
.
Скетч
После прошивки Вы увидите нечто подобное (в скетче вывод даты отредактирован к правому краю под временем):
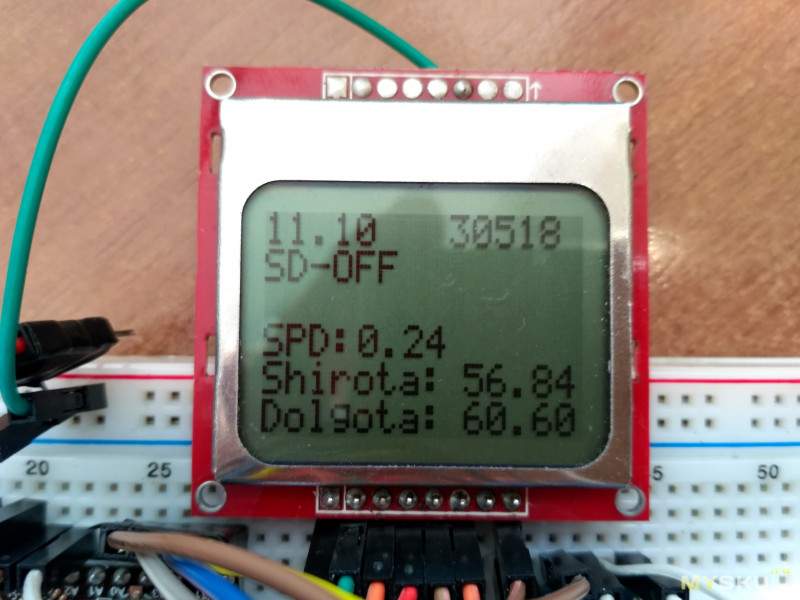
С расположением элементов можно поиграться, был такой вариант, но понял, что усреднение координат выдает огромную погрешность и отказался.
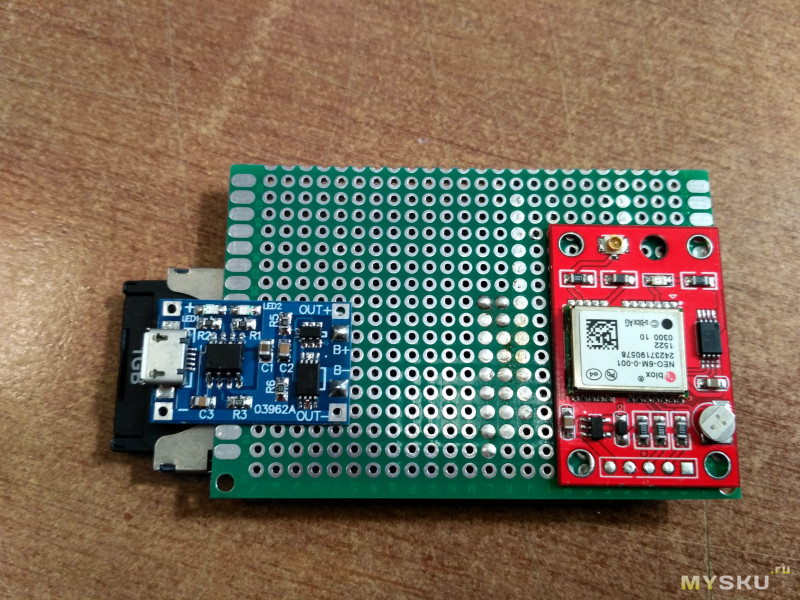
Что делать дальше? Собирать в корпус, можно на клей, можно на двухсторонний скотч все разместить, мне же захотелось все разместить на макетной плате:
В качестве элементов питания я использую LI-ion аккумулятор. Покупаю акб для экшн — камер оптом и использую их в своих поделках + ко всему всегда могут пригодиться для экшн — камеры, которой пользуюсь в походах.
Покупал тут
.

Далее идет борьба за место, отрезаем лишнее от контактов и ровняем их с высотой макетной платы.
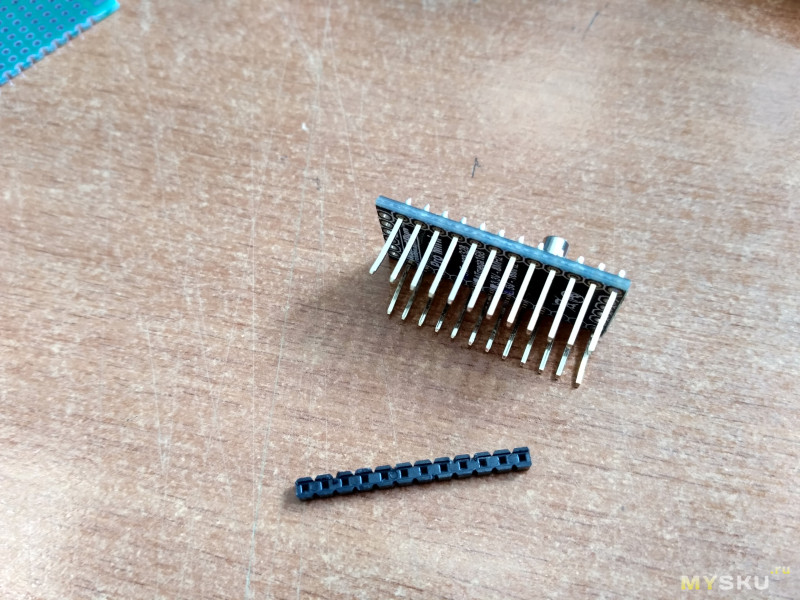
Используя макетную плату, собираем все воедино:
На корпус для карты памяти наклеил кусок изоленты, тк он соприкасается с контактами зарядника для батареи. Карту памяти прошиваем в FAT16.


Потом запускаем и проверяем, не забыв поставить выключатель:



Источник: http://mysku.ru/blog/aliexpress/62773.html
Плюсы и минусы самодельной конструкции
К сожалению, сделать идеальное устройство без недостатков не представляется возможным, но все же оно имеет некоторые достоинства
Плюсы самодельного gps трекера:
- стоимость оборудования в разы меньше, чем стоимость аналогичного, приобретенного в магазине;
- функционал самодельного устройства такой же, как и у промышленного гаджета;
- при необходимости покупки дополнительного оборудования, оно все равно получится недорогим;
- как правило, самодельные устройства – гораздо долговечнее, чем их заводские аналоги.
Вид платы для GPS трекера с двух сторон:


Не стоит забывать и про недостатки трекера, сделанного своими руками:
- из-за размеров существует сложность, при размещении в салоне автомобиля;
- точность работы трекера зависит от качества мобильной сети, так как основой является телефон;
- прочность конструкции далека от совершенной, при плохой спайке провода могут отойти друг от друга.
Заводские маяки тоже имеют ряд недостатков, какой выбрать – самодельный или покупной, каждый решает сам. В первую очередь gps трекер нужен для отслеживания автомобиля, поэтому выбирать устройство надо исходя из его надежности.
Источник: http://reckey.ru/besprovodnoe/gps-treker-dlya-mashiny-svoimi-rukami/
GPS трекер Mini A8 инструкция по настройке и особенности работы

- Активируйте симку на мобильном телефоне. Во время активации обязательно уберите функцию запросы PIN-кода.
- Примите настройки GPRS интернета.
- Обязательно пополните счёт симки, которую будете вставлять в устройство.
- Откройте крышку на задней панели трекера и вставьте в слот активированную симку. После вставки возле слота должен загореться красный индикатор. Это будет означать, что аппарат начал функционировать. Индикатор прогорит секунд 20, после чего потухнет. Если красное свечение не появляется, это не значит, что устройство сломано — просто у него истощился заряд батареи. В таком случае зарядите аппарат (с сим-картой) и повторите процедуру.
- Далее авторизуйте свой смартфон. Для этого наберите номер телефона, привязанный к симке трекера, вставив перед числами две буквы — SQ. Теперь пользоваться функциями GPS-трекера Mini A8 вы сможете только с одного телефона. Это большой плюс к конфиденциальности, но иногда такая возможность лишь мешает. Чтобы убрать её, достаточно просто отправить на номер трекера уже известные нам буквы SQ без номера телефона.
- Проверять местонахождение GPS трекера Mini A8. Для этого надо отправить на номер аппарата SMS с буквами DW. Менее чем через минуту на смартфон придёт сообщение с указанием точного географического расположения аппарата. В дополнение к этому аппарат пришлёт ссылку на локацию. Открыть её можно при наличии хотя бы слабого интернет-соединения.
- Прослушивать разговор человека, находящегося в машине. Для этого необходимо лишь позвонить на номер трекера. «Трубка» снимется автоматически по истечении нескольких секунд после начала вызова. Вместе с этим сразу же включится микрофон. Таким образом вы сумеете прослушать всё, что происходит в вашем авто. Этой же функцией можно пользоваться в тех случаях, когда трекер находится в кармане человека. Принцип действия тот же — надо набрать номер.
- Активировать автоматический звонок трекера. В данном случае аппарат сам вам позвонит, если поблизости будет уловлен шум. Чтобы включить эту функцию, надо отправить на номер устройства сообщение 1111. Выключение описываемой возможности происходит при помощи отправки SMS с цифрами 0000. Применять такую возможность можно только для охраны своей машины. Если аппарат будет находиться в кармане супруги или рюкзаке ребёнка, он будет звонить вам постоянно из-за непрерывного улавливания шумов.
Как видно, все функционирование GPS-трекера Mini A8 основано на использовании мобильной сети. Поэтому вам надо периодически пополнять денежный баланс вставленной СИМ-карты, иначе ни звонить, ни присылать SMS аппарат не сможет.
Источник: http://proumnyjdom.ru/poleznye-stati/gps-brelok.html
Обработка результатов
Результаты представляются в виде текстового файла:
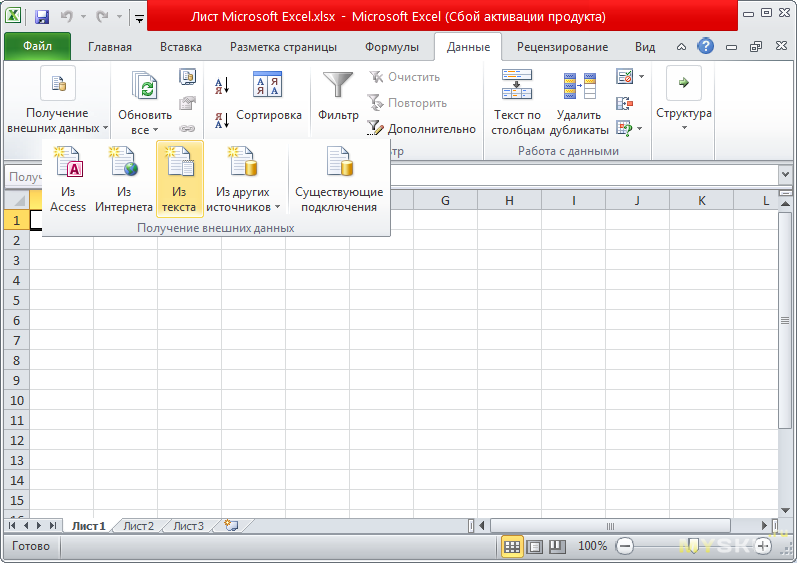
Далее полученные данные загоним в эксель:
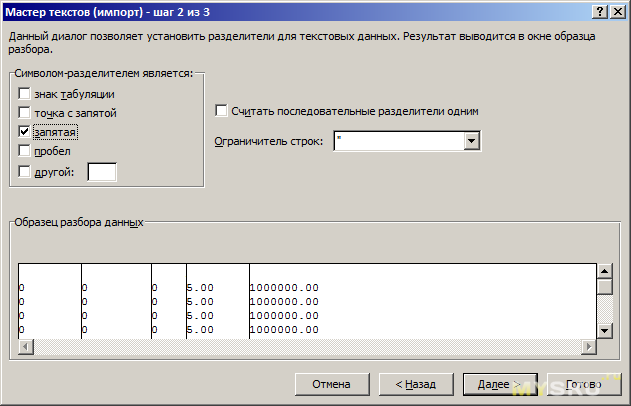
Разделитель колонок выставляем — запятая:
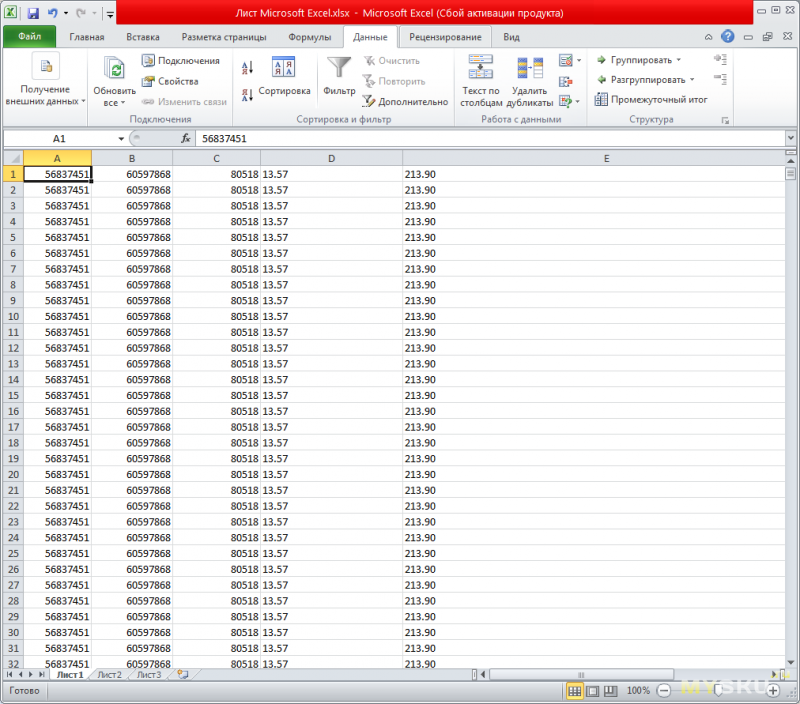
Готово:
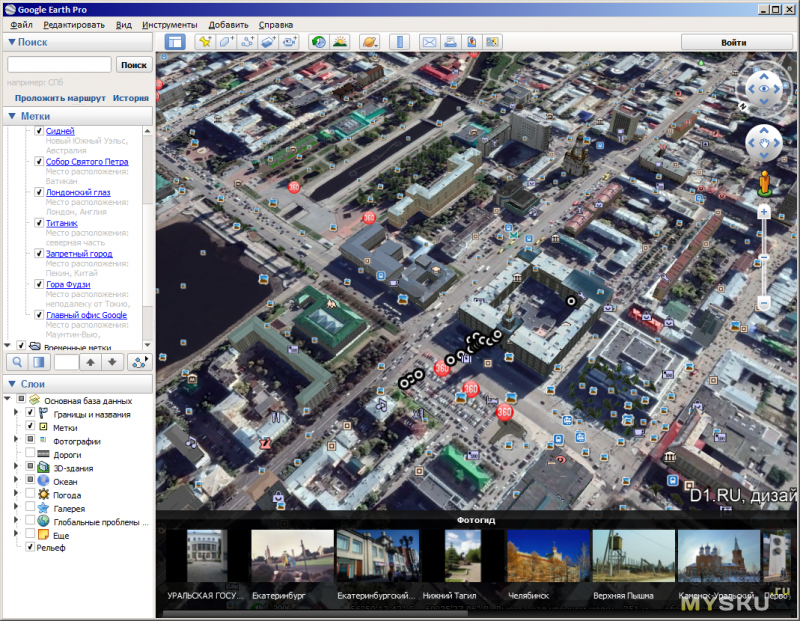
Далее можно загрузить все это дело в ПО Google Earth Pro, используя вкладку
Файл -> Открыть
, открываем наш файлик и выбираем столбцы, отвечающие за широту и долготу и получаем похожий трек (тк я был в одном месте, то получил россыпь точек):
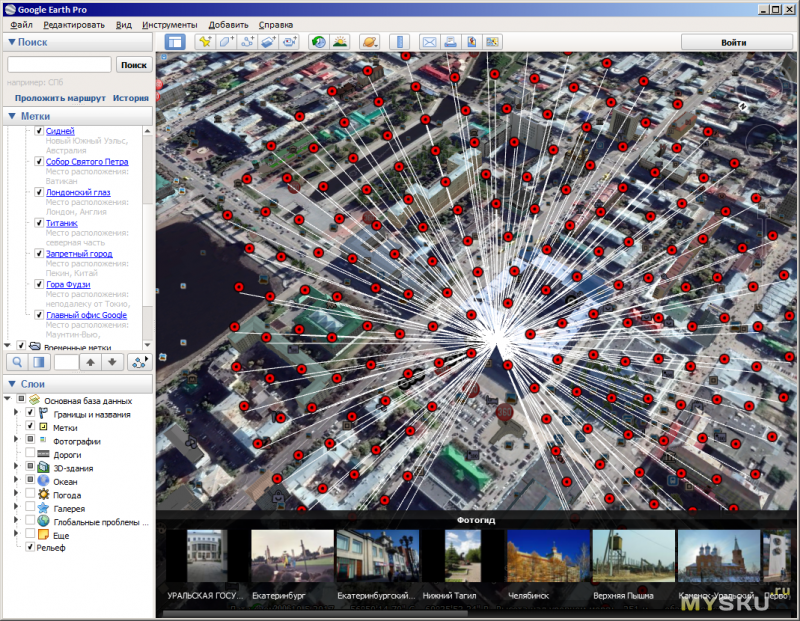
Можно выбрать точку и отобразить все количество точек, которые ей соответсвуют:
Источник: http://mysku.ru/blog/aliexpress/62773.html
Что дальше?
В машине трекер работает от встроеной USB-розетки. Если хотите сделать его более автономным, используйте Power Shield или аккумулятор «крона».
Хотите собрать другой девайс?Выберите будущее устройство из списка проектов на Slot Shield.
Где скачать необходимые библиотеки и как их установить?
Источник: http://wiki.amperka.ru/slot-box:gps-tracker
Видео “Изготовление GPS-маячка из телефона”
Процесс превращения мобильного телефона в GPS-маячок изложен в видеоролике от канала КТО-ГДЕ. ИНФО.
Источник: http://avtobez.com/gps-i-gsm/mayachok-svoimi-rukami-8957/
Обновление от 22.05.18
1. Заменил корпус и изготовил антенну из представленной мною ссылке. (Уменьшил время холодного старта, быстрее находит спутники, значительно быстрее.)
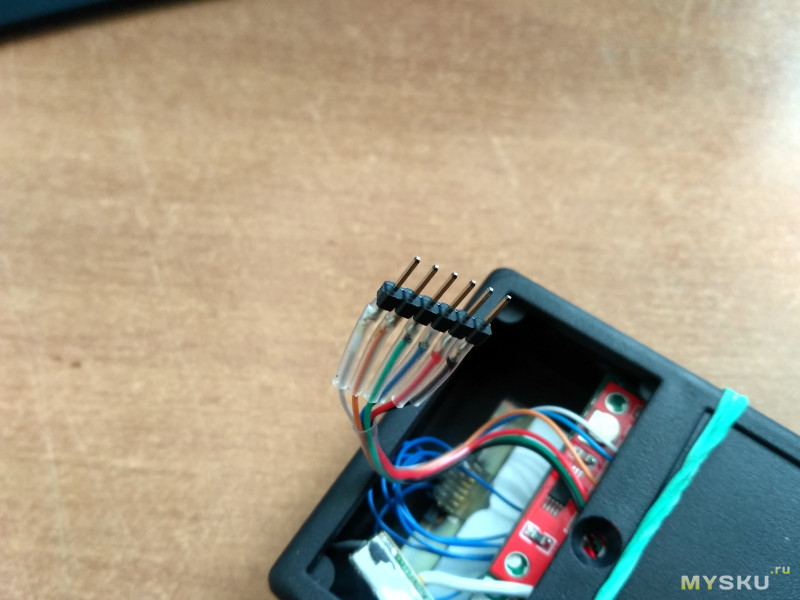
2. Вынес разъем дебага наружу (поигравшись, буду писать прошивку поинтереснее, выкладывать буду сюда же)
3. Для уменьшения занимаемого места, разобрал дисплей и подпаялся к нему.
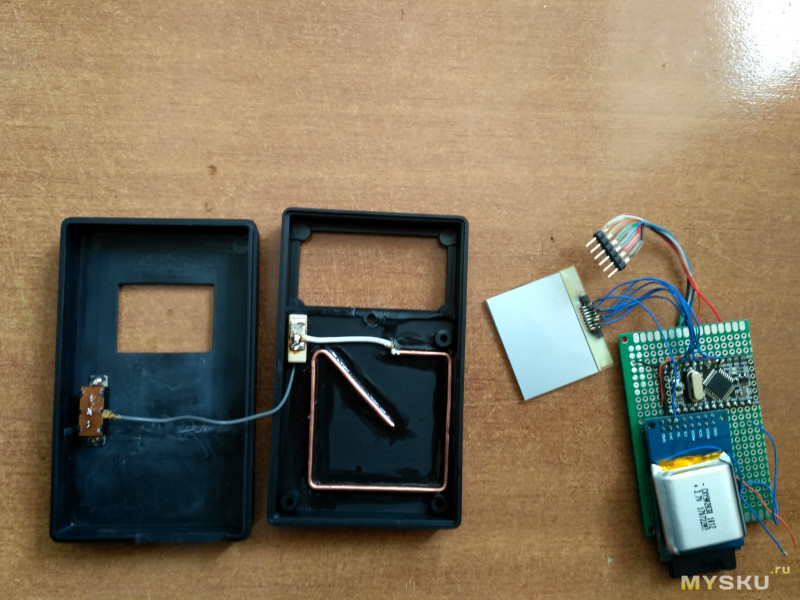

Пока вид такой.
Источник: http://mysku.ru/blog/aliexpress/62773.html